Publications
Notation * indicates equal contributions.
2024
-
 COMPOSER: Scalable and Robust Modular Policies for Snake RobotsIn International Conference on Robotics and Automation (ICRA), 2024
COMPOSER: Scalable and Robust Modular Policies for Snake RobotsIn International Conference on Robotics and Automation (ICRA), 2024
Abridged in CoRL 2023 Workshop on Learning for Soft Robots: Hard Challenges for Soft Systems (Spotlight) -
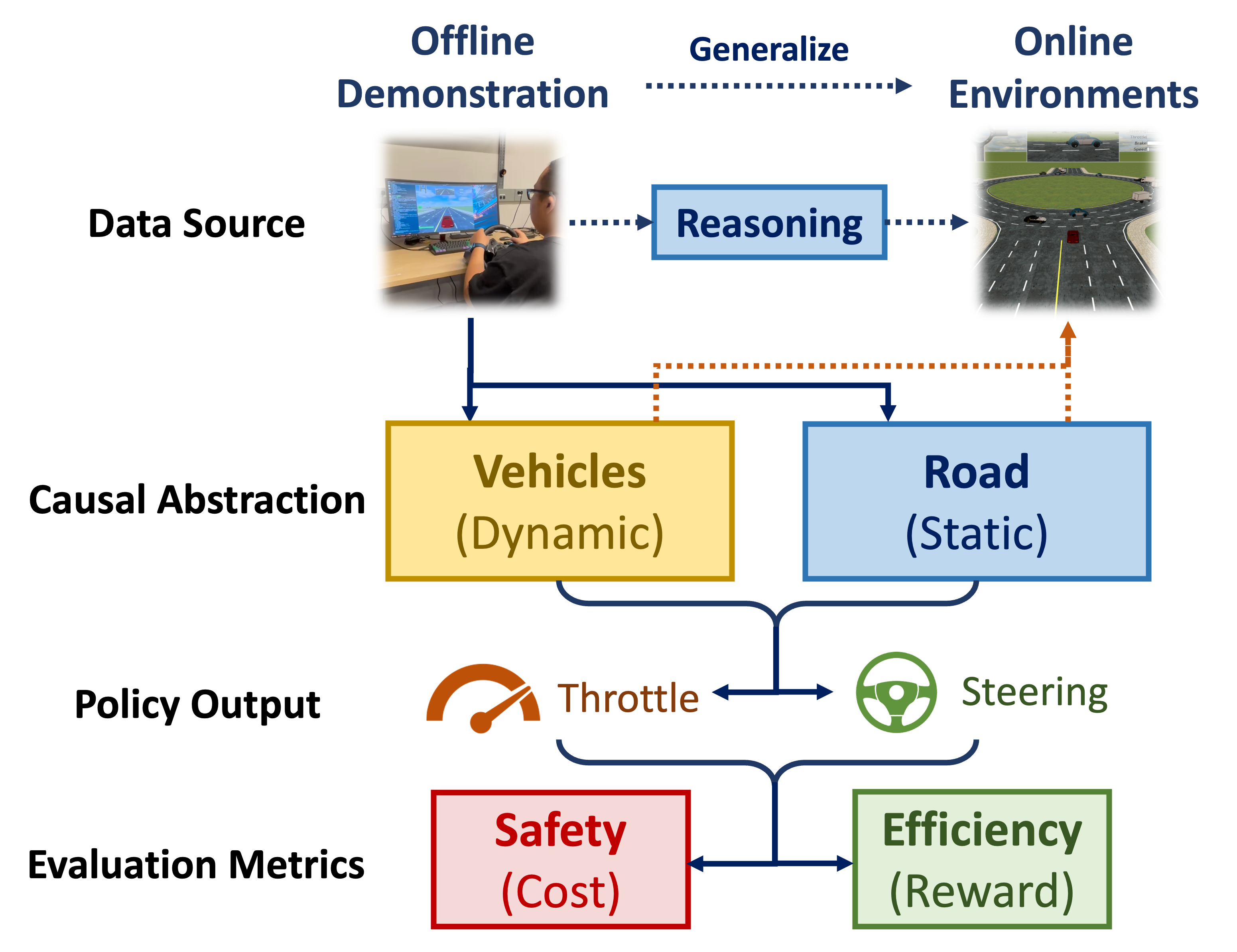 Safety-aware Causal Representation for Trustworthy Reinforcement Learning in Autonomous DrivingRobotics and Automation Letters (RA-L), 2024
Safety-aware Causal Representation for Trustworthy Reinforcement Learning in Autonomous DrivingRobotics and Automation Letters (RA-L), 2024
Abridged in Machine Learning for Autonomous Driving Symposium
2023
-
 Creative Robot Tool Use with Large Language ModelsarXiv preprint, 2023
Creative Robot Tool Use with Large Language ModelsarXiv preprint, 2023
In CoRL 2023 Workshop on Language and Robot Learning and NeurIPS 2023 Workshop on Foundation Models for Decision Making -
 GOATS: Goal Sampling Adaptation for Scooping with Curriculum Reinforcement LearningIn International Conference on Intelligent Robots and Systems (IROS), 2023
GOATS: Goal Sampling Adaptation for Scooping with Curriculum Reinforcement LearningIn International Conference on Intelligent Robots and Systems (IROS), 2023
Abridged in ICRA 2023 Workshop on Representing and Manipulating Deformable Objects [PDF] [Spotlight Talk] -
 Group Distributionally Robust Reinforcement Learning with Hierarchical Latent VariablesIn International Conference on Artificial Intelligence and Statistics (AISTATS), 2023
Group Distributionally Robust Reinforcement Learning with Hierarchical Latent VariablesIn International Conference on Artificial Intelligence and Statistics (AISTATS), 2023
In 5th Symposium on Advances in Approximate Bayesian Inference
2022
2021
-
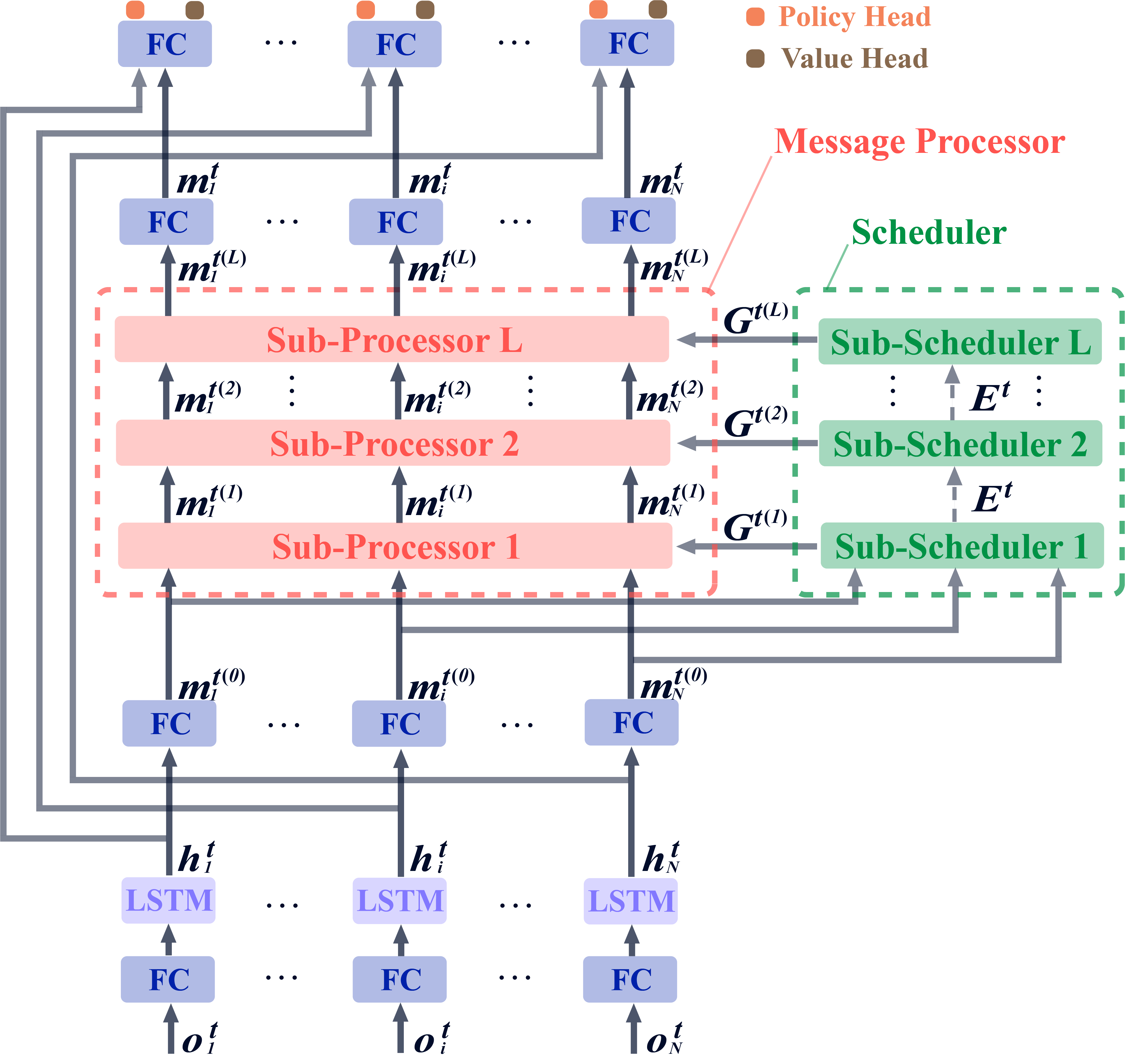 Multi-Agent Graph-Attention Communication and TeamingIn International Conference on Autonomous Agents and Multiagent Systems (AAMAS), 2021 (Oral)
Multi-Agent Graph-Attention Communication and TeamingIn International Conference on Autonomous Agents and Multiagent Systems (AAMAS), 2021 (Oral)
Best Paper Award at ICCV 2021 Mair2 Workshop [PDF] [Spotlight Talk]
2020
-
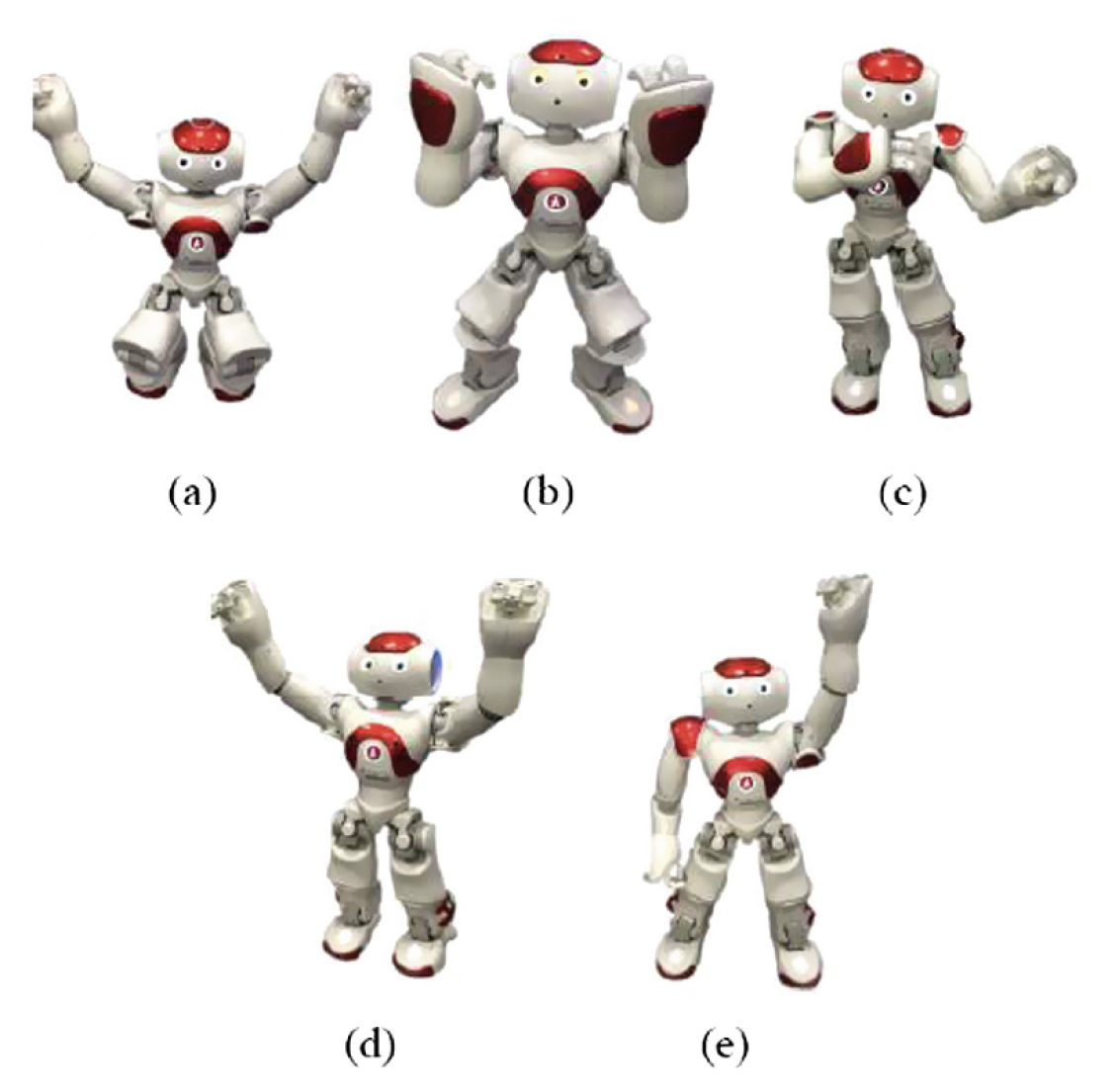
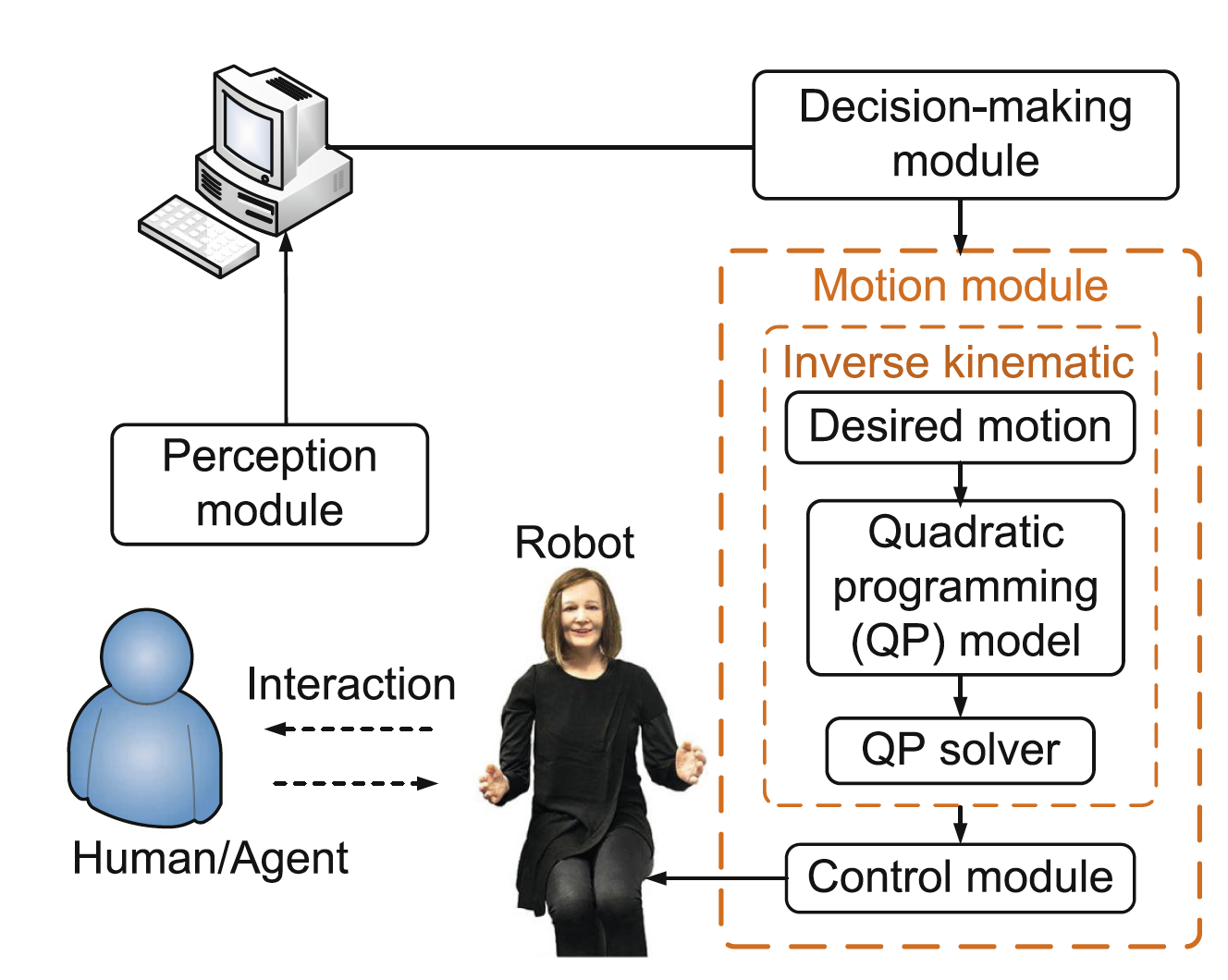
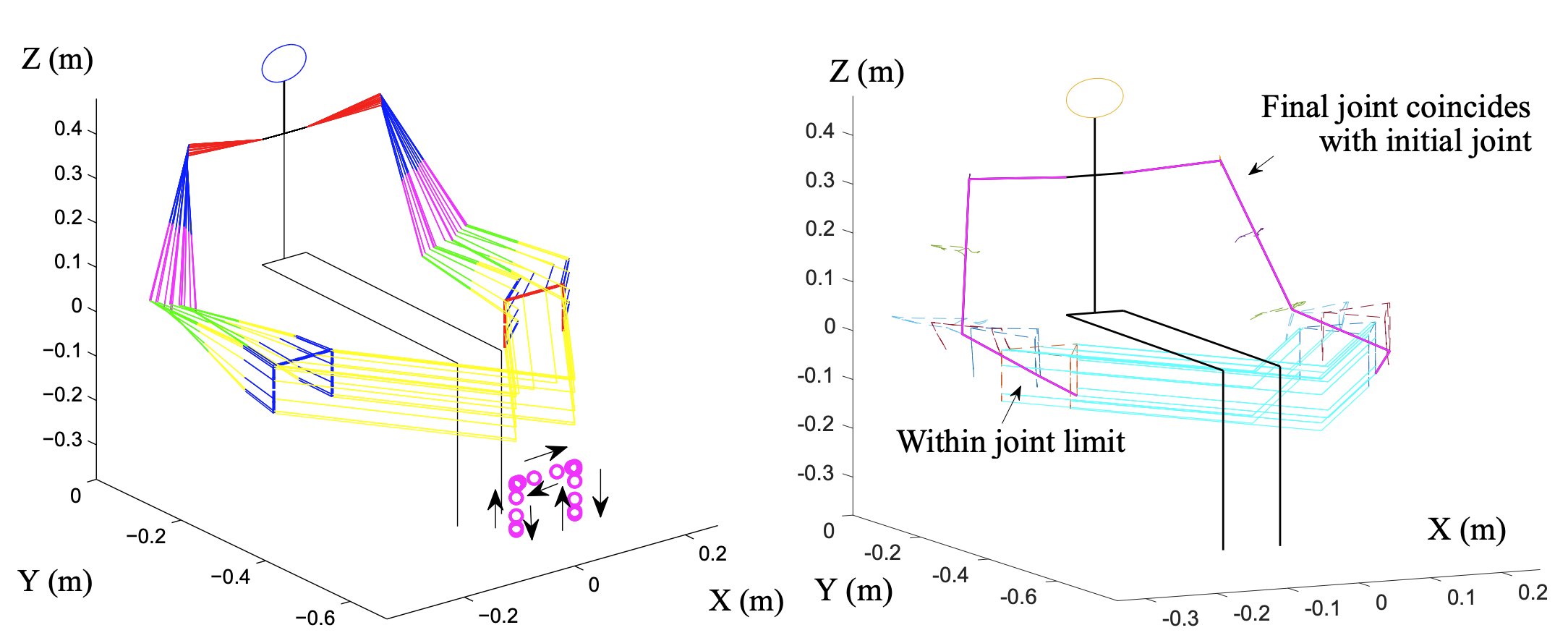 Modification of Gesture-Determined-Dynamic Function with Consideration of Margins for Motion Planning of Humanoid RobotsarXiv preprint, 2020
Modification of Gesture-Determined-Dynamic Function with Consideration of Margins for Motion Planning of Humanoid RobotsarXiv preprint, 2020